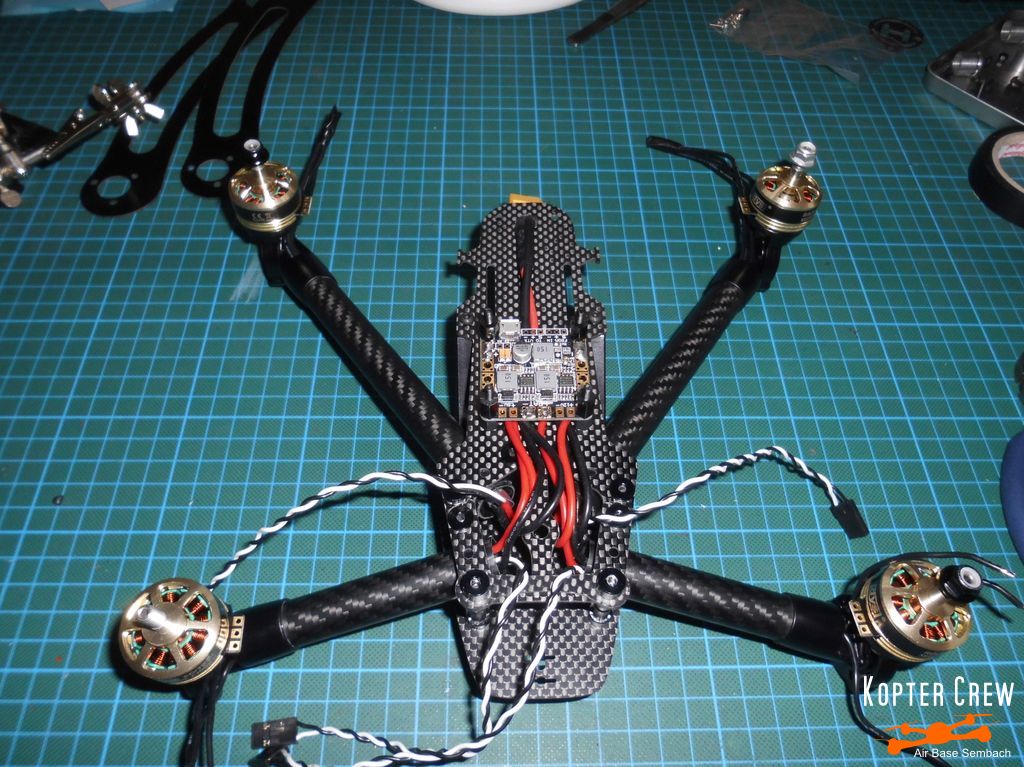
Zum Beginn meines Berichtes übder den Sky Hero Anakin FPV Racer möchte ich als erstes jedem abraten, diesen Rahmen zu verwenden. Der fertige Kopter sieht zwar klasse aus und fliegt sich sehr gut, aber der Aufbau ist sehr schwierig und stabil ist er auch nicht. Ich habe mich beim Aufbau dieses Rahmens dazu entschlossen, die ESC´s in den Armen zu verstauen, so wie es vom Hersteller auch vorgeschlagen wird. Das bedeutet aber, ich musste an den ESC´s schon die Motorzuleitungen verlötet haben, um diese durch einen der schmalen Schlitze der Motormounts zu ziehen. Im Normalfall hätte ich also die Kabel der Motoren extrem kürzen müssen und diese dann im montierten Zustand an die ESC Kabel verlöten müssen. Da ich eh schon nicht gerne 2 Kabel miteinander verlöte, wäre dies der absolute Horrorfall gewesen. Gott sei dank haben aber die DYS Motoren Lötpads und somit war dieses Problem schon mal gelöst. Alternativ wären hier wohl die Multistar Elite mit integrierten ESC auch eine gute Lösung.
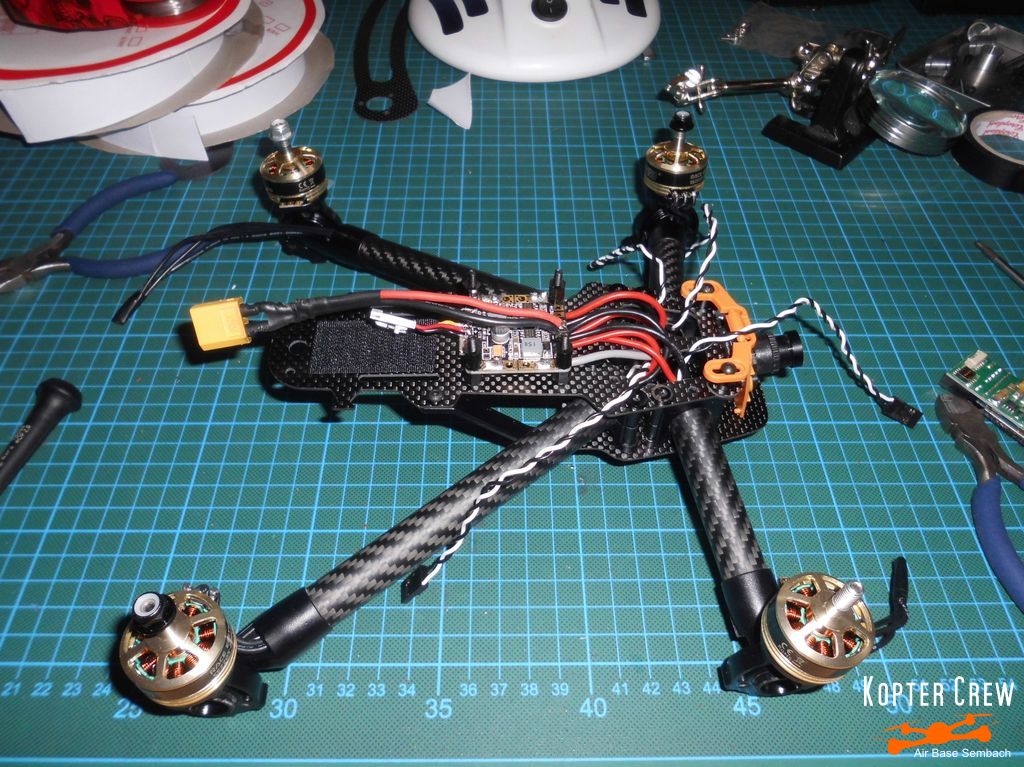
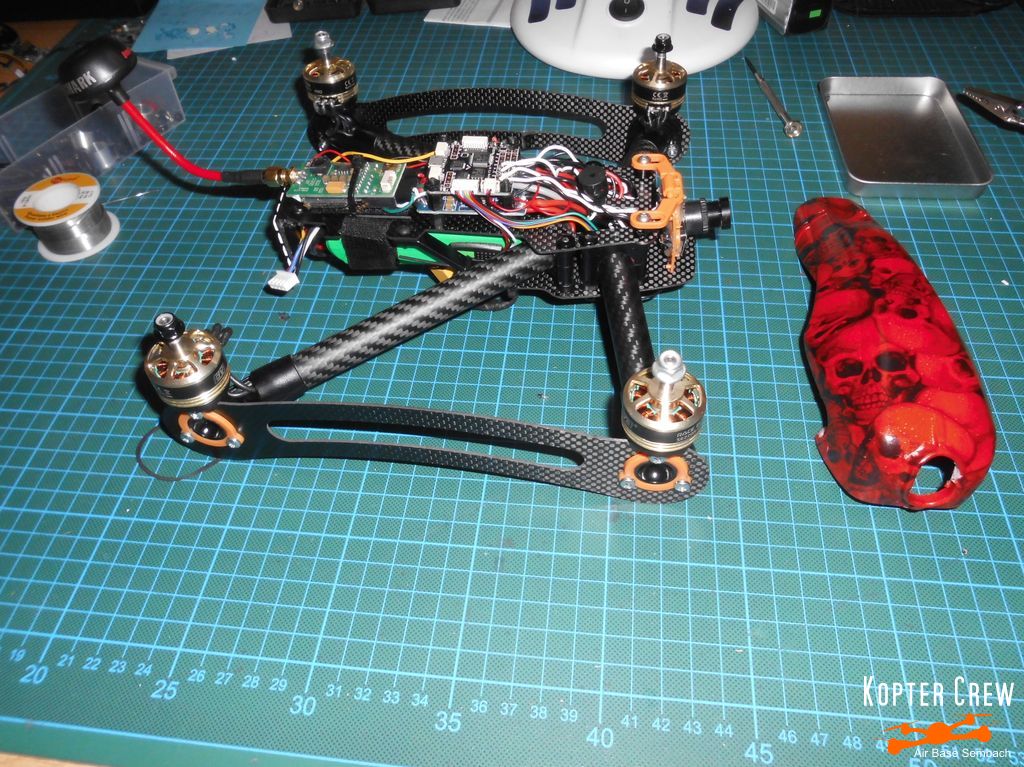
Das Ausrichten des Frames gestaltete sich auch sehr viel schwieriger als angenommen. Ich konnte die Rohre schieben und drehen wie ich wollte, ich bekam die Motoren nicht symetrisch und gelevelt auf den Rahmen. Um so verwunderlicher ist das gute Flugbild, dass der fertige Kopter an den Tag legt. Die Kamerahalterung am Sky Hero ist auch eher schlecht als recht. Man kann die Kamera nur einstecken, nicht befestigen und der Anstellwinkel ist auch nur minimal zu justieren. Am Ende habe ich die Kamera dann mit Heisskleber eingeklebt, da beim Aufsetzen des Canopys immer die Kamera aus der Halterung geschoben wurde. Der restliche Zusammenbau gestaltete sich dann aber eher simpel. Das PDB und der FC haben ihren festen Platz, sowie der VTX. Bei den ersten Flugtests wurden die Motoren an 4S sehr heiß, obwohl sie auch 5S vertragen sollen. Bleibt abzuwarten, ob ich hier noch eine Überraschung erlebe.
Das Setup des Sky Hero Anakin:
- Rahmen: Sky Hero Anakin
- Flightcontroller: SP Racing F3 Agro
- Motoren: Dys SE2205 Pro Race Edition 2300kv
- ESC: Flycolor Raptor F390-20 Amp.
- PDB: Matek STOSD8
- RC Empfänger: Graupner GR-16
- Kamera: Fatshark 700TVL
- VTX: ImmersionRC 25mW mit Raceband